*
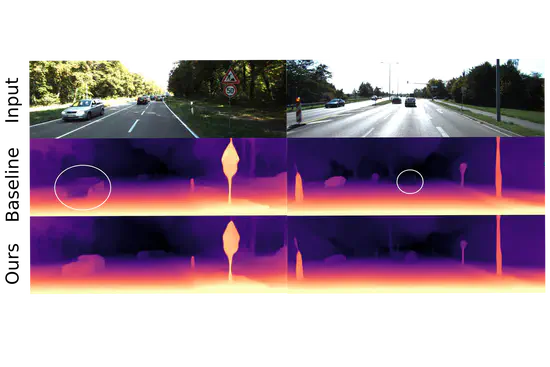


Depth Estimation via Self-Supervised Learning
In this work, we propose a new method to address dynamic object movements through monocular 3D object detection.
Monocular SLAM With 3D Objects
In this paper, we propose a novel data association method for cuboid landmarks based on Dirichlet Process Mixture Model.
On-site Inspection Robot in Substation
In this project, we build from scratch a robot that is used in an electricity substation for daily inspection of all kinds of gauges.